
Nissan GT-R R36 - Liberty Walk

Bei der Planung für diesen Umbau zum RC-Modell war die Prämisse ein Fahrzeug zum Cruisen zu bauen und nicht für die Rennstrecke. Im Vordergrund stand die langsamfahr-Eigenschaft.
Wie bei den meisten Modellen von mir gewohnt, wurden Standard-Komponenten verwendet. Aber die Vorteile des 3D-Drucks kamen ebenso wieder zum Einsatz.
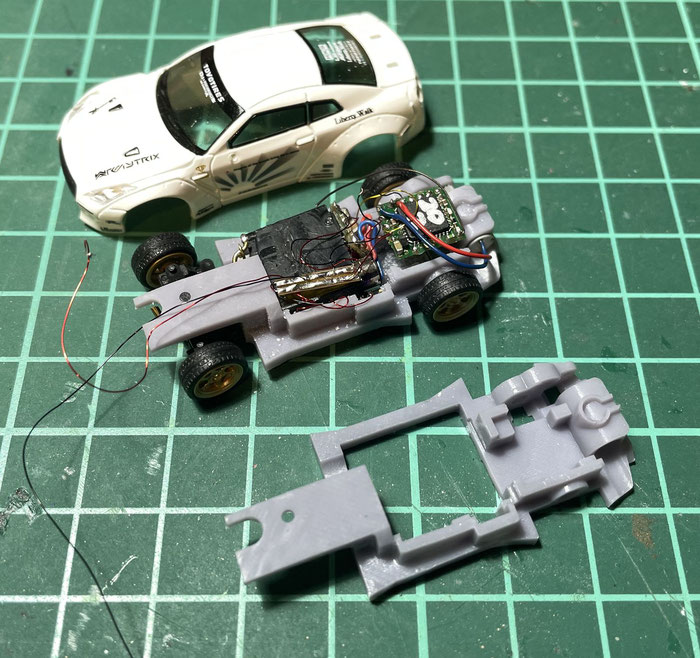
Bevor es wirklich los geht mit Konstruieren, muss als erstes das Chassis so angepasst werden, das zum einen die Höhe passt und zum anderen auch der Radstand. Nichts ist schlimmer, wenn das Fahrzeug später ein Keilfahrwerk hat oder die Reifen in den Radkästen schleifen.
Da ich von dem Modell keine CAD-Daten habe, musste gemessen und getestet werden. Ich übertreibe nicht, wenn ich sage, das es dabei um jedes 1/10 geht. Spätere Anpassungen sind meistens nur mit viel Aufwand möglich. Und ja, ich habe auch schon einmal geschludert und später die Quittung bekommen, spätere Korrekturen machen keinen Spaß und kosten unnötig Zeit und vor allem auch Nerven.


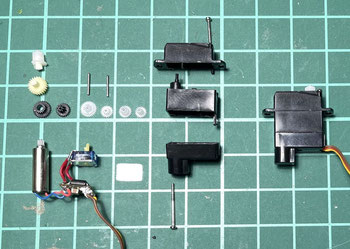
Ja, das sind die Hauptkomponenten des Antriebes, ein 1,9g Micro-Servo.
Das Getriebe, besser gesagt die Zahnräder stammen zum größten Teil aus einem ausge- schlachteten Servo. Die dort verwendeten Doppelzahnräder aus POM im Modul 0,15 sind ideal, wenn man ein Getriebe ohne Schnecke verwenden möchte. Insgesamt wurden drei Getriebestufen verwendet um eine möglichst hohe Übersetzung zu erreichen. Als Antrieb kommt ein 4x8mm Motor zum Einsatz, da der im Servo vorhandene Motor zum einen zu lange und eine zu hohe Drehzahl hat.
Gesteuert wird alles über einen Deltang RX45, der neben einem Motorregler auch mehrere Ausgänge für Lichtfunktionen besitzt. Durch die Funktionalität und kompakte Form ist der Empfänger
ideal für PKW Modelle.
Ladebuchse und Schalter wurden so platziert, das diese von unten zu bedienen sind. Beides wurde so ins Chassis integriert, das dies Komponenten nur geklipst werden müssen. Es besteht also keine
Gefahr, das Kleber in den Schalter läuft. Dieses Problem kennen garantiert die meisten von euch.

Die vier Rücklichter agieren auch gleichzeitig als Bremslichter. Dabei wurde eine Dioden-schaltung verwendet, die es ermöglicht, zwei Schaltausgänge (Licht und Bremslicht) des Empfängers an eine LED anzuschließen und dabei unterschiedliche Widerstände zu verwenden. Dadurch ergeben sich beim Rücklicht und beim Bremsvorgang unterschiedliche Helligkeiten.

Am Heck gab es wie beim Original-Chassis einen kleinen Diffuser und seitlich ein paar Flügel. Nach ein paar Versuchen hat alles gepasst und das Resultat kann sich sehen lassen. Mit etwas Farbe sieht man kaum einen Unterschied zum Original.
Verwendete Komponenten:
Lenkung: 1,7g Micro Servo
Lenkung: PKW-Lenkachse
Getriebe: 1,9g Micro Servo (einige Doppelzahnräder und Wellen)
Motor: 4x8mm Motor Mikromodellbau.de
Empfänger: Deltang RX 45
Beleuchtung: Licht, Lichthupe, Rücklicht und integriertes Bremslicht
Lipo: 90 mAh
Reifen: Original
Ein bisschen Tuning
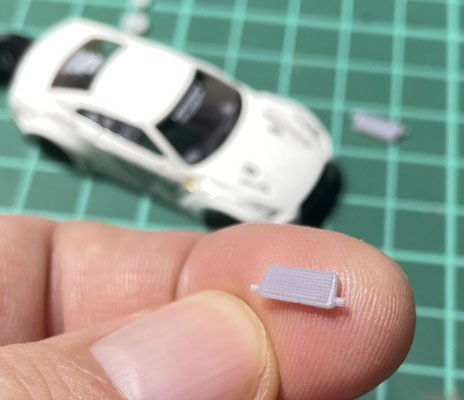

Für eine mögliche Steigerung der Motorleistung wurde schon einmal vorgesorgt und ein Ladeluftkühler von Mishimoto ein Intercooler M-Line konstruiert. Lieber haben als hätte, oder wie sagt man so schön.


Aus mehr Motorleistung resultiert in der Regel auch eine höhere Geschwindigkeit. Damit das Fahrzeug dieser auch weiterhin stabil und gut kontrollierbar bleibt, wird der Spoiler am Heck entsprechend optimiert und etwas vergrößert, was zu mehr Anpressdruck führt. Eine finale Version gibt es noch nicht, da der Prototyp optisch noch nicht so ganz passt. Da muss ich später noch einmal ran.